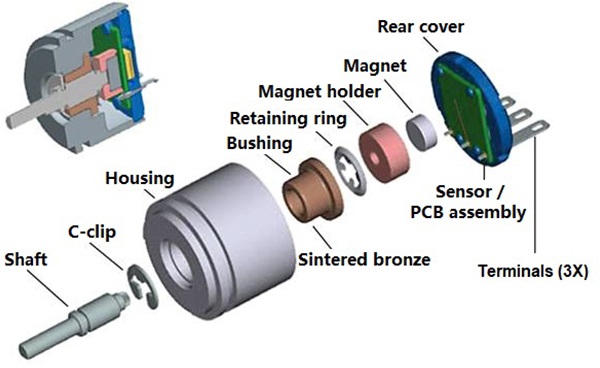
Kung adunay ka higayon nga i-disassemble ang usa ka magnetic rotary encoder, kasagaran makakita ka usa ka internal nga istruktura sama sa gipakita sa ibabaw. Ang magnetic encoder gilangkoban sa usa ka mechanical shaft, usa ka shell structure, usa ka PCB assembly sa katapusan sa encoder, ug usa ka gamay ngamagnet nga discnagtuyok uban sa shaft sa katapusan sa mekanikal nga shaft.
Giunsa pagsukod sa magnetic encoder ang feedback sa rotation position?
Epekto sa Hall: ang paghimo sa potensyal nga kalainan sa usa ka konduktor nga nagdala sa koryente kung ang usa ka magnetic field gipadapat sa direksyon nga tul-id sa direksyon nga nag-agos.
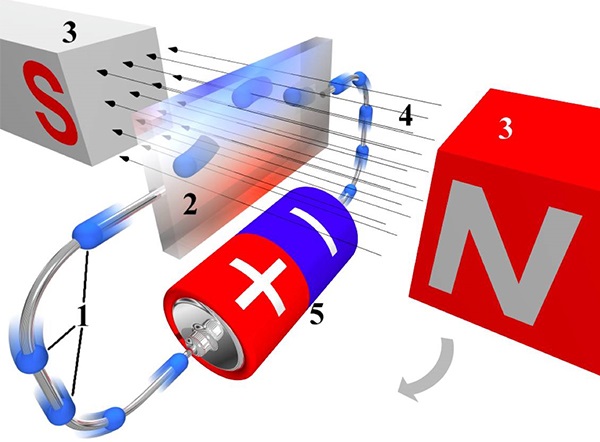
Kung ang magnetic field nga gipadapat sa konduktor gipatuyok sa direksyon nga gipakita sa arrow sa ibabaw nga adunay kasamtangan nga agianan sa agianan ingon nga axis, ang potensyal nga kalainan sa Hall mausab tungod sa pagbag-o sa anggulo tali sa magnetic field ug sa conductor, ug ang pagbag-o sa uso sa potensyal nga kalainan usa ka sinusoidal curve. Busa, base sa boltahe sa duha ka kilid sa kusog nga konduktor, ang rotation angle sa magnetic field mahimong kalkulado nga balit-ad. Kini ang sukaranan nga mekanismo sa pagtrabaho sa usa ka magnetic encoder kung gisukod ang feedback sa posisyon sa rotation.
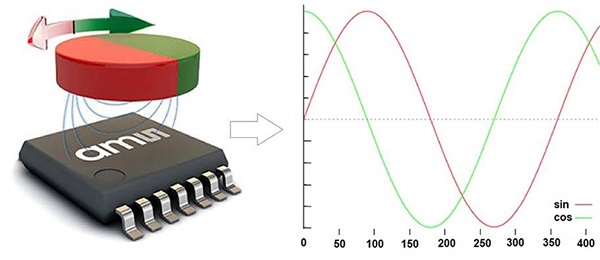
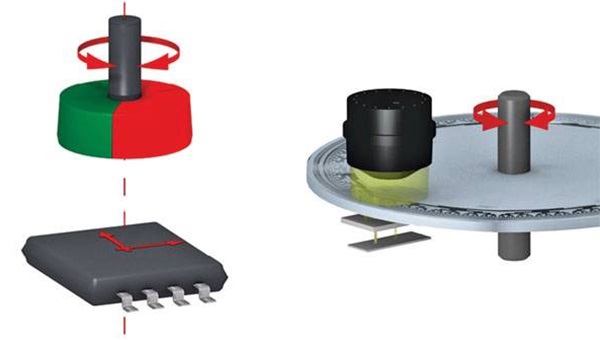
Sama sa prinsipyo nga ang solver naggamit sa duha ka set sa mutually perpendicular output coils, duha (o duha ka pares) hall induction nga mga elemento nga adunay mutually perpendicular kasamtangan nga direksyon gikinahanglan usab sa magnetic encoder aron masiguro ang talagsaon nga sulat tali sa rotating position sa magnetic field. ug ang output boltahe (kombinasyon).
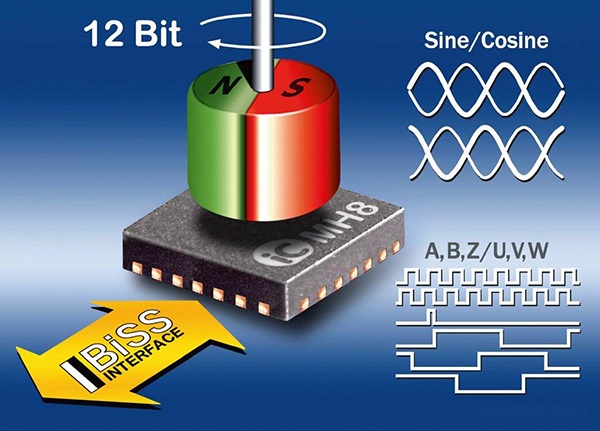
Karong panahona, ang Hall sensors (chips) nga gigamit sa magnetic encoders sa kasagaran adunay taas nga lebel sa integration, nga dili lamang nag-integrate sa mga component sa hall semiconductor ug may kalabutan nga pagproseso sa signal ug regulasyon nga mga sirkito, apan naghiusa usab sa nagkalain-laing matang sa signal output modules, sama sa sine ug cosine analog signal, square wave digital level signal o bus communication output units.
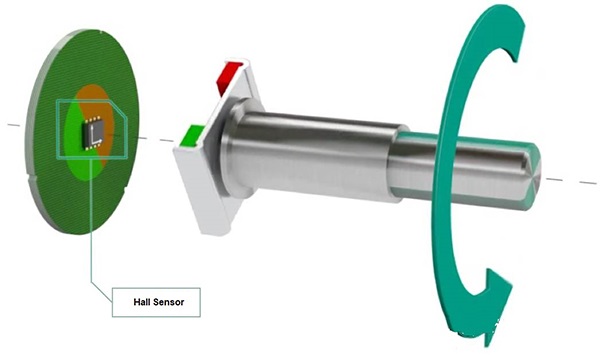
Niining paagiha, pag-instalar og permanenteng magnet sama sa sintered Neodymium magnet nga makamugna og magnetic field sa katapusan sa encoder rotating shaft, ibutang ang hall sensor chip nga gihisgutan sa ibabaw sa PCB circuit board, ug duola ang permanente nga magnet sa katapusan sa encoder. shaft sumala sa piho nga mga kinahanglanon (direksyon ug distansya).
Pinaagi sa pag-analisar sa boltahe nga signal output gikan sa hall sensor pinaagi sa PCB circuit board, ang rotating position sa encoder rotor mahimong mailhan.
Ang istruktura ug prinsipyo sa pagtrabaho sa magnetic encode nagdesisyon sa espesyal nga kinahanglanon bahin sa kini nga permanente nga magnet sama sa materyal nga magnet, porma sa magnet, direksyon sa magnetization, ug uban pa.diametrically magnetized Neodymium magnetAng disc mao ang labing kaayo nga kapilian sa magnet. Ang Ningbo Horizon Magnetics nasinati sa pagsuplay sa daghang mga tiggama sa mga magnetic encode nga adunay pipila ka gidak-ondiametrical Neodymium disk magnet, D6x2.5mm ug D10x2.5mm diametric disc Neodymium magnet nga mao ang labing popular nga mga modelo.
Makita nga kon itandi sa tradisyonal nga optical encoder, ang magnetic encoder wala magkinahanglan og komplikadong code disk ug light source, ang gidaghanon sa mga component mas gamay, ug ang detection structure mas simple. Dugang pa, ang elemento sa Hall mismo adunay daghang mga bentaha, sama sa lig-on nga istruktura, gamay nga gidak-on, gaan nga gibug-aton, taas nga serbisyo sa kinabuhi, pagsukol sa vibration, dili mahadlok sa abug, lana, alisngaw sa tubig ug polusyon sa gabon sa asin o paghulat sa corrosion.
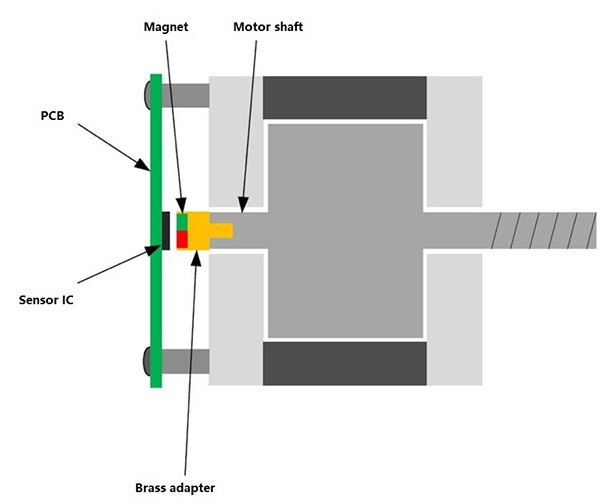
Sa diha nga ang magnetic encoder teknolohiya gipadapat sa rotation posisyon feedback sa electric motor, angsintered NdFeB magnet silindrosa magnetic encoder mahimong direkta nga ma-install sa katapusan sa motor shaft. Niining paagiha, mapapas niini ang transitional coupling bearing (o coupling) nga gikinahanglan sa paggamit sa tradisyonal nga feedback encoder, ug makab-ot ang contactless position measurement, nga makapamenos sa risgo sa encoder failure (o bisan sa kadaot) tungod sa vibration sa mechanical shaft atol sa ang operasyon sa electric motor. Busa kini makatabang sa pagpalambo sa kalig-on sa electric motor nga operasyon.
Oras sa pag-post: Hul-21-2022